Nous avons réussi à fabriquer une balise laser et l’avons testé en 2015 avec succès.
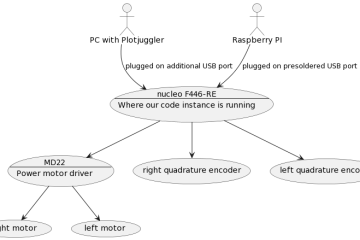
Le principe: un miroir tourne sur lui-même via le petit moteur afin de détecter les balises cylindriques posées sur les adversaires. Nous détectons donc l’angle de détection de la balise, ainsi que la largeur de détection de cette dernière. Tous les calculs se basent donc sur le temps mesuré à partir du départ du tour (on utilise un optocoupleur IR en fourche). Une bande réfléchissante en microcube collée sur la balise cylindrique permet une détection jusqu’à 1,50m à 5cm près (l’an dernier). Nous espérons que la nouvelle version améliorera la précision.
La solution est apparemment assez fiable, même sur des robots qui n’ont pas une balise super stable (exemple avec le robot araignée https://youtu.be/gFBEnMU2oxI)
Merci à IFM (http://www.ifm.com) et en particulier à Christophe Jossinet pour son soutien concernant le projet !
Matériel utilisé:
- laser IFM OJ5014 classe 1
- bande réfléchissante avec microcube
- Arduino (pro micro)
- optocouleur fourche (récupéré dans une vielle imprimante)
- des miroirs (récupérés dans un vieux scanner)
- un moteur d’un ancien lecteur de CD/DVD
- Autodesk Fusion 360
- une imprimante 3D “Printrbot métal plus”