A la une !
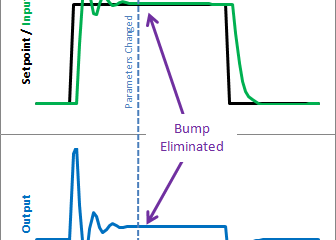
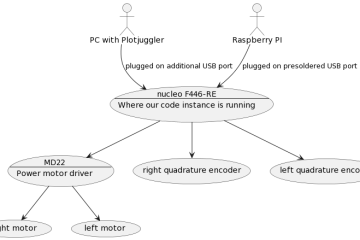
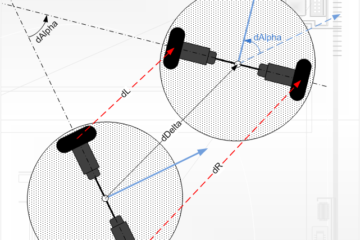
Asservissement et pilotage de robot autonome
Cet article est une introduction intuitive aux principaux problèmes que l’on peut rencontrer lorsque l’on souhaite contrôler le déplacement d’un robot. Comme chaque problème a sa solution, les principes seront décrits, en utilisant le moins de théorie possible. Introduction Je Lire la suite…